DC 모터 기초 원리와 구조
로봇 공학 모터 제어 입문 — 1단계
왜 DC 모터부터 시작하는가?
로봇 공학을 공부하다 보면 가장 먼저 마주치는 부품 중 하나가 모터(Motor)입니다. 팔을 들어 올리는 관절, 바퀴를 굴리는 구동부, 그립을 쥐는 손가락 — 모두 모터가 핵심입니다.
모터의 종류는 매우 다양합니다. BLDC, 스테핑, 서보, 리니어 모터까지. 그런데 왜 DC 모터부터 시작할까요?
DC 모터를 완벽히 이해하면 BLDC, 스테핑, 서보 모터의 원리도 자연스럽게 연결됩니다. 기초 없이 고급 내용을 배우면 언젠가 반드시 벽에 부딪힙니다.
DC 모터란 무엇인가?
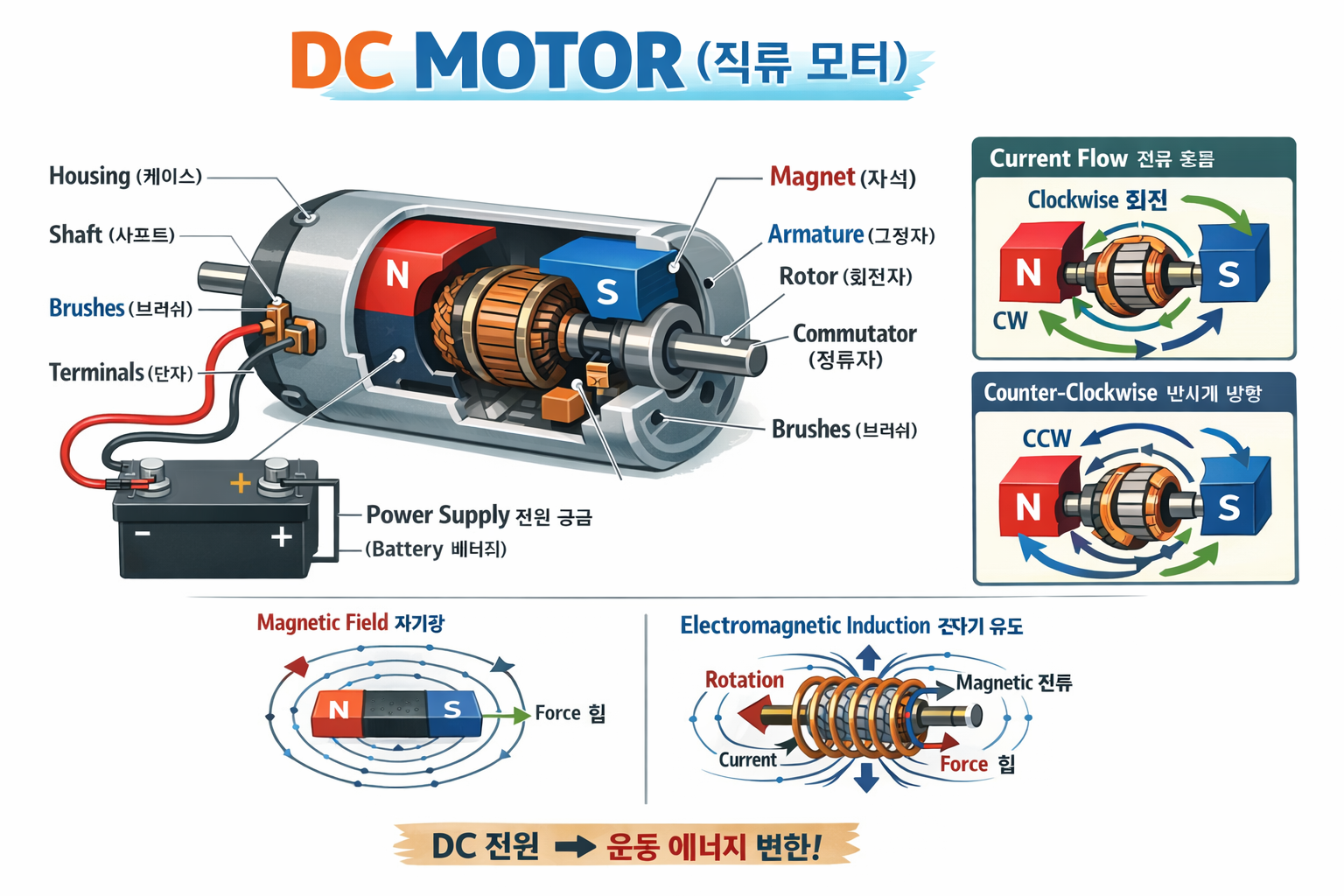
DC 모터(Direct Current Motor)는 직류 전기 에너지를 회전 운동 에너지로 변환하는 장치입니다. 배터리의 직류 전기를 연결하면 축(Shaft)이 회전합니다. 이 단순한 동작 하나가 로봇 모든 움직임의 출발점입니다.
일상에서 마주치는 DC 모터는 생각보다 훨씬 많습니다.
모두 원리는 동일합니다. 전기 → 자기력 → 회전의 흐름입니다.
핵심 원리 — 로렌츠의 힘
DC 모터가 돌아가는 핵심 원리는 로렌츠의 힘(Lorentz Force)입니다. 물리 시간에 배웠을 수도 있지만, 로봇 공학 관점에서 다시 정리해봅시다.
이 힘이 연속적으로 발생하면서 축이 회전하는 것이 바로 DC 모터입니다.
플레밍의 왼손 법칙 — 방향을 알아야 제어한다
힘의 크기만큼 중요한 것이 방향입니다. 이를 판단하는 도구가 플레밍의 왼손 법칙입니다.
🤚 플레밍의 왼손 법칙 — 왼손으로 직접 따라해보세요
(N극 → S극)
DC 모터의 내부 구조
DC 모터의 내부는 크게 세 가지 핵심 부품으로 나뉩니다.
핵심 스펙 읽는 법
모터를 구매하거나 데이터시트를 볼 때 반드시 이해해야 하는 수치들입니다. 이것을 모르면 모터 선택을 잘못하게 됩니다.
| 스펙명 | 단위 | 설명 | 주의사항 |
|---|---|---|---|
| 정격 전압 | V | 안정 동작 설계 전압 (예: 12V DC) | 초과 시 과열 · 수명 단축 |
| 정격 전류 | A | 정상 부하 상태의 전류 | Stall Current는 훨씬 높음 |
| 토크 | N·m / kg·cm | 회전 방향으로 가해지는 힘 | 로봇 팔 설계의 핵심 기준 |
| 회전수 (RPM) | RPM | 1분당 회전 횟수 | 토크와 반비례 관계 |
| 역기전력 | V | 회전 시 발생하는 반대 방향 전압 | 속도 추정에 활용 가능 |
토크 계산 예시
팔 길이 0.3 m, 끝에 1 kg 물체 들기
= 1 kgf × 0.3 m = 0.3 kg·m ≈ 2.94 N·m 필요
토크-속도 특성 곡선 (T-N Curve)
DC 모터의 성능을 한눈에 보여주는 그래프가 토크-속도(T-N) 곡선입니다. 모터 선택 시 반드시 참고해야 합니다.
RPM ↑ | ← No Load RPM (부하 없을 때 최대 회전수) | \ | \ | \ ← T-N 곡선 (이상적인 DC 모터는 직선) | \ | \ |_______\____________→ Torque ↑ Stall Torque (모터가 멈출 때 발휘하는 최대 토크) // 동작점(Operating Point): 실제 부하 선과 T-N 곡선이 교차하는 지점 // 곡선 중간(최대 효율 구간) 근처에서 동작하도록 모터를 선택하세요
역기전력 (Back-EMF)
모터가 회전할 때, 코일은 자기장 속에서 운동하므로 스스로 발전기처럼 동작하며 공급 전압과 반대 방향의 전압을 만들어냅니다. 이것이 역기전력(Back-EMF)입니다.
역기전력이 클수록 모터가 빠르게 돌고 있다는 뜻입니다. 이 원리를 이용하면 별도의 속도 센서(엔코더) 없이도 회전 속도를 추정할 수 있습니다. 고급 BLDC 제어나 센서리스(Sensorless) 제어에서 핵심 개념입니다.
첫 실습 추천 모터
처음 DC 모터를 공부할 때는 저렴하고 구하기 쉬운 모터로 시작하는 것이 좋습니다.
| 모델 | 정격 전압 | 특징 | 가격대 |
|---|---|---|---|
| TT 기어드 모터 추천 | 3~6V | 기어 내장, RC카·2족 보행 로봇 바퀴용 | 500~1,000원 |
| N20 소형 기어모터 추천 | 6V | 작고 강한 토크, 로봇 관절 입문에 최적 | 1,000~3,000원 |
| 775 모터 | 12V | 강한 출력, 중형 드릴·공구 프로젝트 | 3,000~5,000원 |
1편 핵심 요약
자기장 + 전류 = 회전력
회전자(코일)
브러시/정류자
RPM · 역기전력
정밀 위치 제어 어려움
PWM 속도 제어
아두이노 실습